COMPUTER
AIDED
ARCHITECTURAL DESIGN
Workshop 17 Notes,
Week of November 28 , 2017
GEODESIC OCTAHEDRON AND ICOSAHEDRON POLYGON SURFACES THROUGH SPHERICAL PROJECTION
The geodesic geometry illustrated here is based on the two cases of the Octahedron and of the Icosahedron in parts 2 and 3 below. These workshop notes are intented to supplement the introduction to this geodesic geometry in the workhops directly, and do not replace the workshops completely.In the examples below, polygons are again described with reference to the World Coordinate System.
PART 1. Polygon Surfaces Based Upon Vertices, Faces and Surface Normals.
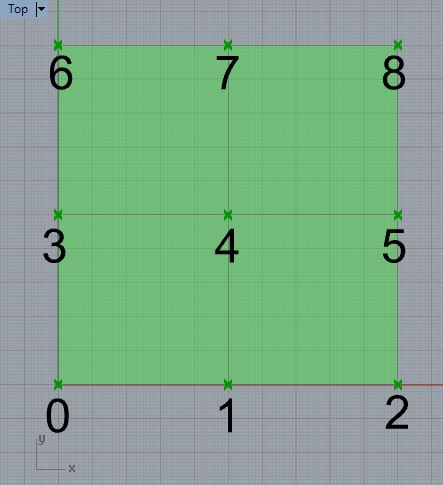
In previous workshop notes 16, we noted that in the following figure, there are nine vertices, labelled 0 through 8, and four associated faces determined by indexes to the vertices (0, 1, 4, 3), (1, 2, 5, 4), (3, 4, 7, 6) and (4, 5, 8, 7). To generate the surface, we need a way to organize every four adjacent vertices such that they form the individual grid faces that constitute the overall surface. Thus a list of all the vertices and separate list consisting of an indexing system that determines all the subgroups of 4 vertices forming each face are both needed. (This example is modified after a rhinoscriptsyntax help example provided by McNeel Inc.). In addition, the indexes to the vertices llist them in counter clock-wise order such as in the case of vertices 0, 1, 4, 3 beginning with the lower left-hand vertice 0.
A Python script to generate the polygon mesh surface and index into the vertices would be as follows. Note that the "faceVertices" array contains a list of index locations in the "vertices" array for each face of the polygon mesh.
| import
rhinoscriptsyntax as rs import Rhino as rh #vertices of polygon mesh pt0 = rh.Geometry.Point3d(0, 0, 0) pt1 = rh.Geometry.Point3d(5, 0, 0) pt2 = rh.Geometry.Point3d(10, 0, 0) pt3 = rh.Geometry.Point3d(0, 5, 0) pt4 = rh.Geometry.Point3d(5, 5, 0) pt5 = rh.Geometry.Point3d(10, 5, 0) pt6 = rh.Geometry.Point3d(0, 10, 0) pt7 = rh.Geometry.Point3d(5, 10, 0) pt8 = rh.Geometry.Point3d(10, 10, 0) #create array of vertices vertices = [pt0, pt1, pt2, pt3, pt4, pt5, pt6, pt7, pt8] #create index into vertices array to determine faces faceVertices = [] faceVertices.append((0,1,4,3)) faceVertices.append((1,2,5,4)) faceVertices.append((3,4,7,6)) faceVertices.append((4,5,8,7)) a = rs.AddMesh( vertices, faceVertices ) #output variable a b = vertices #output variable b |
However, in order to control the visibility of polygon surface sphere, the script also adds a vector direction property for each of its vertex pointst. That is, a positive vector pointing perpendicularly outward from the vertex points on the surface makes the sphere visible when viewed from the outside. This vector pointing perpendicularly outward from the surface is typically referred to as the "surface normal". Thus, in the trivial case of the four faces in the example above, for each vertex we create a positive set of postiive vectors "vN" facing upward in the direction (0, 0, 1) as indicated in the grey text box below.
The vectors are placed in a list named "normals" within the script as follows:
#create array of
surface Normals
vN = rh.Geometry.Vector3d(0,0,1)
normals = [vN, vN, vN, vN, vN, vN, vN, vN, vN]
In turn, the "normals" are incorporated incorporated into the polygon surface with the call to the AddMesh function:
a = rs.AddMesh( vertices, faceVertices, normals ) #output variable a with "normals" added to the AddMesh function
| import
rhinoscriptsyntax as rs import Rhino as rh #vertices of polygon mesh pt0 = rh.Geometry.Point3d(0, 0, 0) pt1 = rh.Geometry.Point3d(5, 0, 0) pt2 = rh.Geometry.Point3d(10, 0, 0) pt3 = rh.Geometry.Point3d(0, 5, 0) pt4 = rh.Geometry.Point3d(5, 5, 0) pt5 = rh.Geometry.Point3d(10, 5, 0) pt6 = rh.Geometry.Point3d(0, 10, 0) pt7 = rh.Geometry.Point3d(5, 10, 0) pt8 = rh.Geometry.Point3d(10, 10, 0) #create array of vertices vertices = [pt0, pt1, pt2, pt3, pt4, pt5, pt6, pt7, pt8] #create array of surface Normals vN = rh.Geometry.Vector3d(0,0,1) normals = [vN, vN, vN, vN, vN, vN, vN, vN, vN] #create index into vertices array to determine faces faceVertices = [] faceVertices.append((0,1,4,3)) faceVertices.append((1,2,5,4)) faceVertices.append((3,4,7,6)) faceVertices.append((4,5,8,7)) a = rs.AddMesh( vertices, faceVertices, normals ) #output variable a with "normals" added to AddMesh function b = vertices #output variable b |
Similarly,
in the examples developed for this tutorial, the surface normals are
added to the rhinoscriptsyntax function which generates the polygonal
surface.
 |
 |
 |
| recursive level 3 | recursive level 4 | recursive level 5 |
 |
 |
| recursive level 3 radius 2 transparent shadeding | recursive level 3 radius 2 opaque shading |
 |
 |
| recursive level 4 radius 2 | recursive level 5 radius 2 |
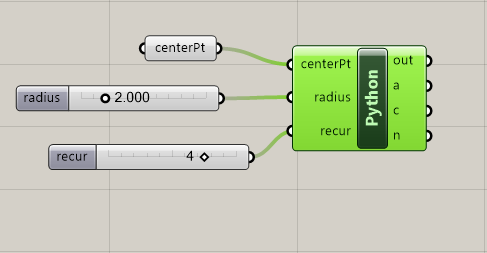
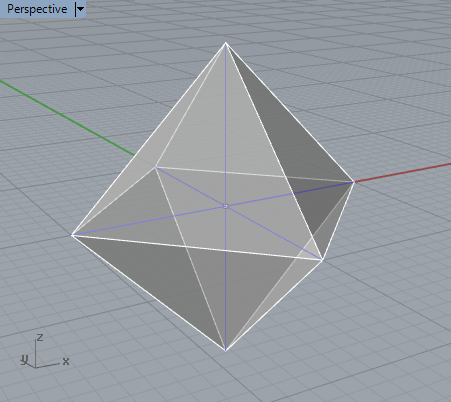
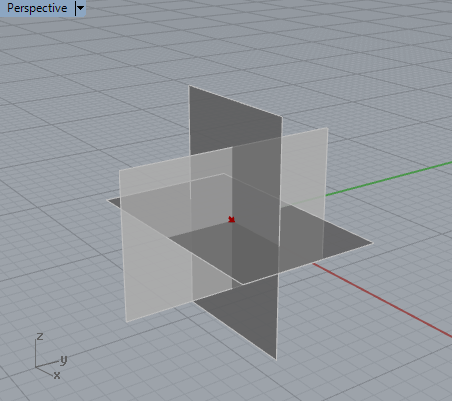
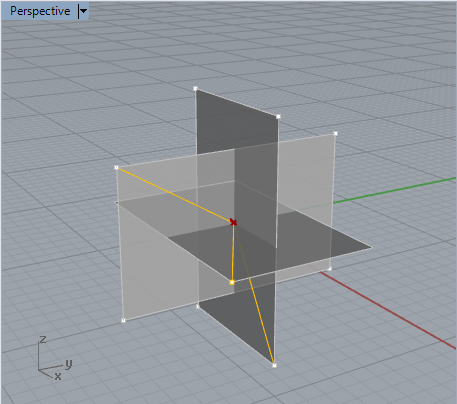
| #create geodesic octahedron by radial
projection based upon recursive triangles #Earl Mark 11.25.17 import rhinoscriptsyntax as rs import Rhino as rh def paramPt(ptA, ptB, param): #get parametric point from ptA to ptB x = ptA.X + (ptB.X - ptA.X) * param y = ptA.Y + (ptB.Y - ptA.Y) * param z = ptA.Z + (ptB.Z - ptA.Z) * param pt = rh.Geometry.Point3d(x, y, z) return pt def getCentroid(ptList): #get centroid of a point list x = 0 y = 0 z = 0 for pt in ptList: x += pt.X y += pt.Y z += pt.Z cPt = rh.Geometry.Point3d(x/len(ptList), y/len(ptList) , z/len(ptList)) return cPt def getAxisPts(centerPt): #gets axis pts at 1 unit radial dimensions in X, Y and Z xAPt1 = rh.Geometry.Point3d(centerPt.X - 1, centerPt.Y, centerPt.Z) xAPt2 = rh.Geometry.Point3d(centerPt.X + 1, centerPt.Y, centerPt.Z) yAPt1 = rh.Geometry.Point3d(centerPt.X, centerPt.Y - 1, centerPt.Z) yAPt2 = rh.Geometry.Point3d(centerPt.X, centerPt.Y + 1, centerPt.Z) zAPt1 = rh.Geometry.Point3d(centerPt.X, centerPt.Y, centerPt.Z - 1) zAPt2 = rh.Geometry.Point3d(centerPt.X, centerPt.Y, centerPt.Z + 1) return [xAPt1, xAPt2, yAPt1, yAPt2, zAPt1, zAPt2] def formOctantTriangles(axisPts): #determine three corner points for each triangle in each octant of the octahedron #start in -z area and counter clockwise at lower left in plan #and then similarly +z area counter clockwise at lower left in plan #in addition, each set of three triangular points must be assembled in counter-clockwise order #when view from outside the Octrahedron towards the interior center #negative z triangles lLeftNz = [axisPts[4],axisPts[2],axisPts[0]] lRightNz = [axisPts[4],axisPts[1], axisPts[2]] uRightNz = [axisPts[4],axisPts[3], axisPts[1]] uLeftNz = [axisPts[4],axisPts[0], axisPts[3]] #positive z triangles lLeftPz = [axisPts[0],axisPts[2],axisPts[5]] lRightPz = [axisPts[2],axisPts[1], axisPts[5]] uRightPz = [axisPts[1],axisPts[3], axisPts[5]] uLeftPz = [axisPts[3],axisPts[0], axisPts[5]] return [lLeftNz, lRightNz, uRightNz, uLeftNz, lLeftPz, lRightPz, uRightPz, uLeftPz] def subdivideTrianglePts(trianglePts): #divide one triangle's pts into 4 sets of #triangle pts including center triangle pt1 = trianglePts[0] pt2 = trianglePts[1] pt3 = trianglePts[2] #determine the midpoints of the three initial corner points pt1m = paramPt(pt1, pt2, 0.5) pt2m = paramPt(pt2, pt3, 0.5) pt3m = paramPt(pt3, pt1, 0.5) #determine the four triangles obtained by subdividing the original triangle lleftT = [pt1, pt1m, pt3m] lrightT = [pt1m, pt2, pt2m] apexT = [pt3m, pt2m, pt3] cenT = [pt3m, pt1m, pt2m] return [lleftT, lrightT, apexT, cenT] def subTriPtRecursive(trianglePts, recur, triangleList): #divides triangles on geodesic surface recursively if (recur == 1): #if recursion is complete then return the triangle points triangleList.append(trianglePts) else: #if more recursion to do, then continue to subdivide each triangle newTriangles = subdivideTrianglePts(trianglePts) triangleList = subTriPtRecursive(newTriangles[0], recur - 1, triangleList) #lower left triangle triangleList = subTriPtRecursive(newTriangles[1], recur - 1, triangleList) #lower right triangle triangleList = subTriPtRecursive(newTriangles[2], recur - 1, triangleList) #apex triangle triangleList = subTriPtRecursive(newTriangles[3], recur - 1, triangleList) #center triangle return triangleList def subTriPtRecurOctants(octantsTriPts, recur, triangleList): #initiate recursive subdivide for each octants original triangle of pts for octT in octantsTriPts: triangleList = subTriPtRecursive(octT, recur, triangleList) return triangleList def projectPts(allTrianglePts, centerPt, r): #project all triangular faces to a spherical coordinate based upon the radius r projTPts = [] cX = centerPt.X cY = centerPt.Y cZ = centerPt.Z for t in allTrianglePts: pt1 = t[0] pt2 = t[1] pt3 = t[2] v1 = rh.Geometry.Vector3d(pt1.X - cX, pt1.Y - cY, pt1.Z - cZ) v2 = rh.Geometry.Vector3d(pt2.X - cX, pt2.Y - cY, pt2.Z - cZ) v3 = rh.Geometry.Vector3d(pt3.X - cX, pt3.Y - cY, pt3.Z - cZ) v1.Unitize() v2.Unitize() v3.Unitize() tP1 = rh.Geometry.Point3d(v1.X * r + cX,v1.Y * r + cY, v1.Z * r + cZ) tP2 = rh.Geometry.Point3d(v2.X * r + cX,v2.Y * r + cY, v2.Z * r + cZ) tP3 = rh.Geometry.Point3d(v3.X * r + cX,v3.Y * r + cY, v3.Z * r + cZ) projTPts.append([tP1, tP2, tP3]) return projTPts def buildPolysurf(projTPts, centerPt): #build faces, center points and center point surface normals i = 0 #initiate index counter for each corner vertex for triangle indexList = [] ptList = [] vertexNormals = [] #to store normal vectors to each point for each face vecNCs = [] #to store normal vectors for each centroid of each face cPts = [] #to store center point of each face for t in projTPts: curSurfIndex = [i, i + 1, i + 2] indexList.append(curSurfIndex) ptList.append(t[0]) ptList.append(t[1]) ptList.append(t[2]) cPt = getCentroid([t[0],t[1],t[2]]) cPts.append(cPt) #get vector from center point of octahedron to center point of unprojected face vecN = rh.Geometry.Vector3d(cPt.X - centerPt.X,cPt.Y - centerPt.Y,cPt.Z - centerPt.Z) #change length of vector to 1 unit vecN.Unitize() #round out vector components to two signicant digits (e.g, 1.23) vecN = rh.Geometry.Vector3d(round(vecN.X, 2), round(vecN.Y, 2), round(vecN.Z, 2)) #store centerpoint of each face cPts.append(cPt) #store vector normal for each vertex of each face vertexNormals.append(vecN) vertexNormals.append(vecN) vertexNormals.append(vecN) #store vector normal for centroid of each face vecNCs.append(vecN) i += 3 #create the surface surf1 = rs.AddMesh(ptList,indexList,vertexNormals) return [surf1, cPts, vecNCs] #main #get the axis points determining initial octahedron axisPts = getAxisPts(centerPt) #determine cornerpoints of each facet of initial octahedron (number of facets is 8) trianglePts = formOctantTriangles(axisPts) octantsTriPts = trianglePts #store all the triangle points for subdivided faces of initial octahedron allTrianglePts = [] #recursively subdivide primary points of faces of initial octahedron allTrianglePts = subTriPtRecurOctants(octantsTriPts, recur, allTrianglePts) #project all the points of the octahedron spherically projAllTPoints = projectPts(allTrianglePts, centerPt, radius) #build the polygon surface mesh for the geodesic octahedron surfData = buildPolysurf(projAllTPoints, centerPt) a = surfData[0] #mesh surface c = surfData[1] #mesh face centerPts n = surfData[2] #mesh face normals print("Number faces " + str(len(n))) |
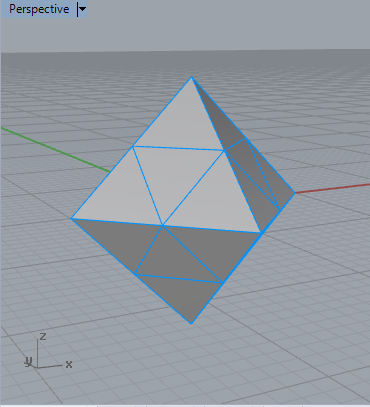
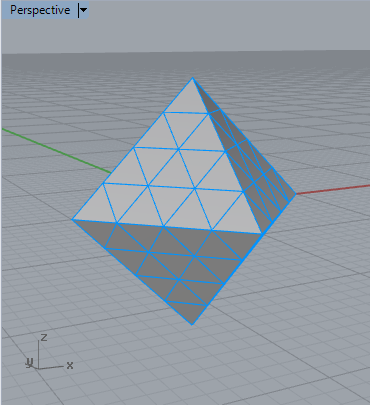
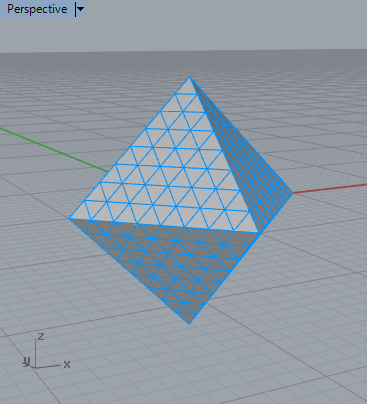
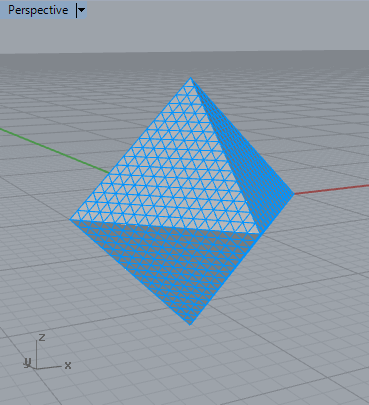
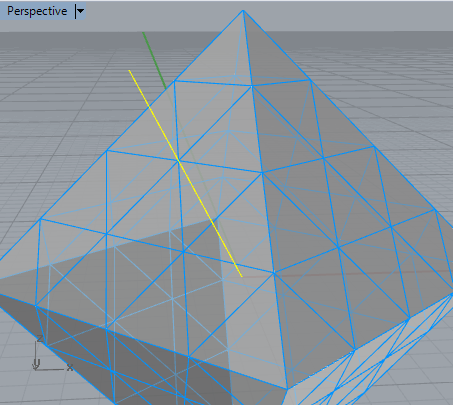
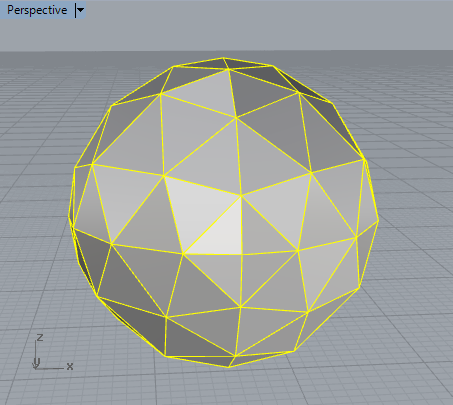
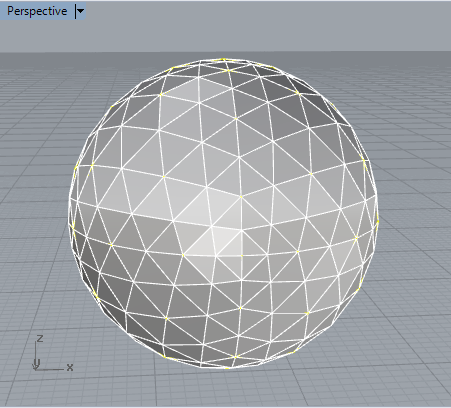
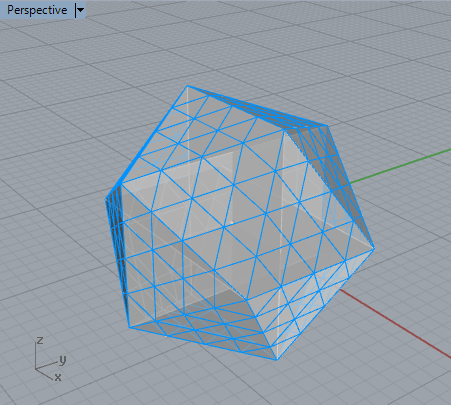
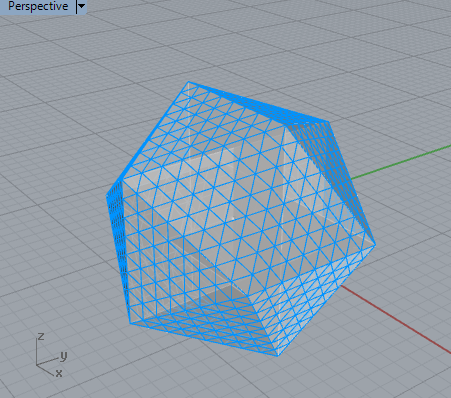
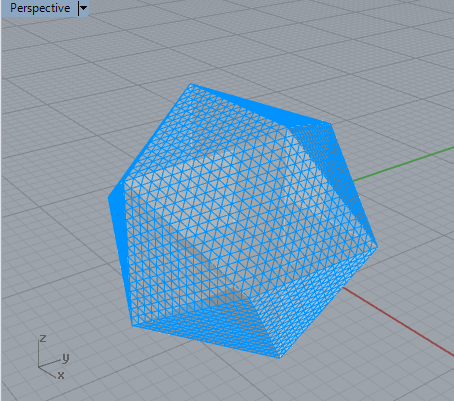
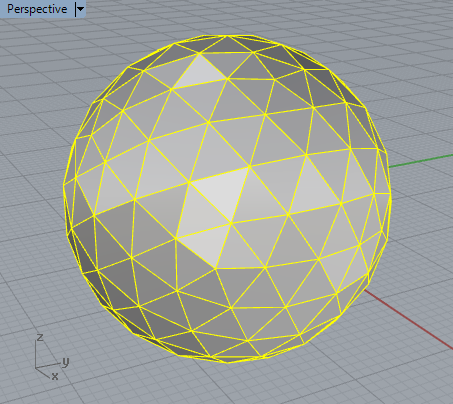
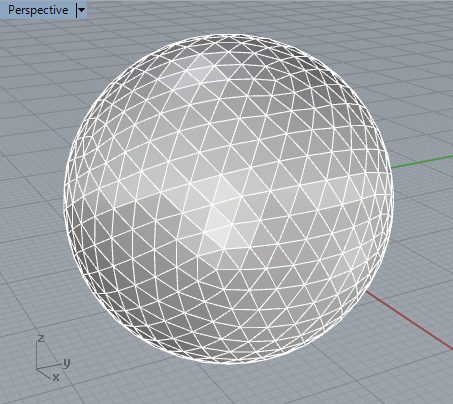
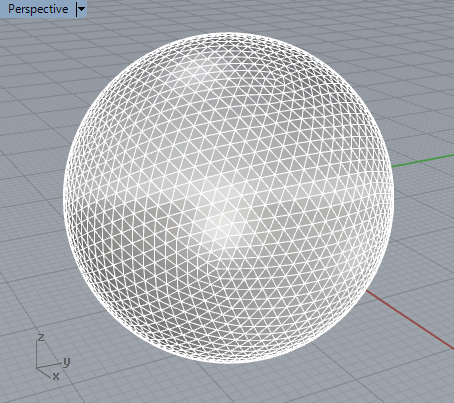
Similar to the Octahedron we can recursively subdivide each triangle as in the following two cases for recursion = 3, 4, and 5. In the case of going from recursion level 1 to recursion level 5 we go from 20 total triangles to 5120 triangles.
 |
 |
 |
| recursive level 3 | recursive level 4 | recursive level 5 |
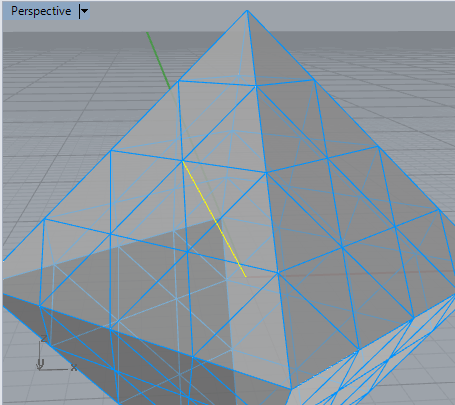
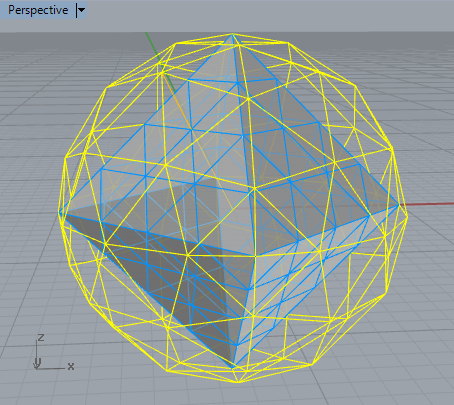
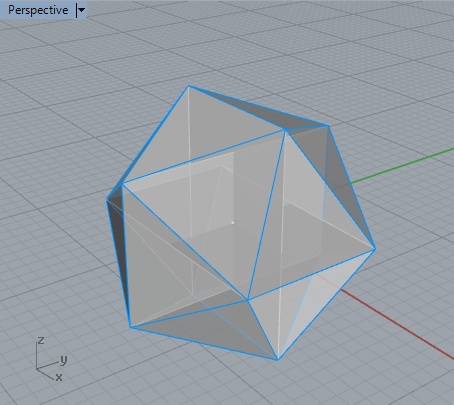
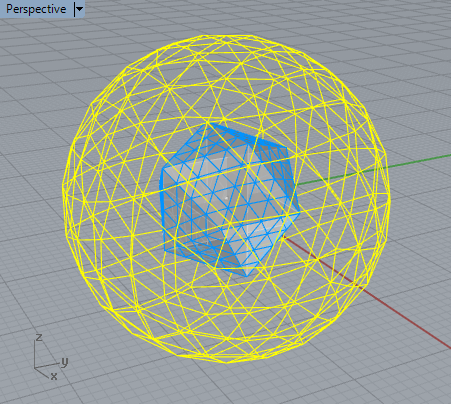
Using the same method of projection
developed for the Octahedron, we can spherically project each of the
trianglular vertices at a radial values. Project
the vertices at the radius distance of 1, and you get the
projection indicated in the following figure.
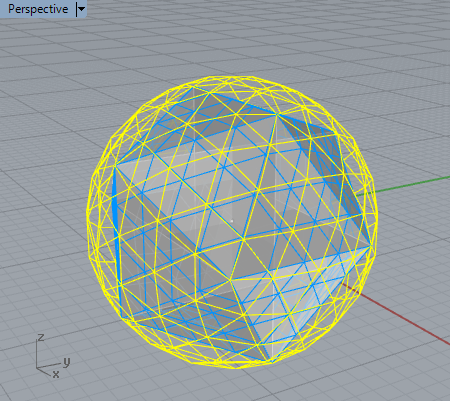
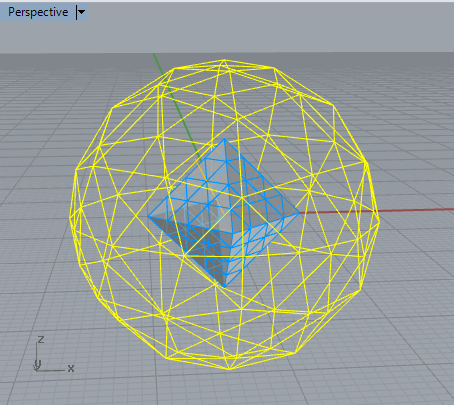
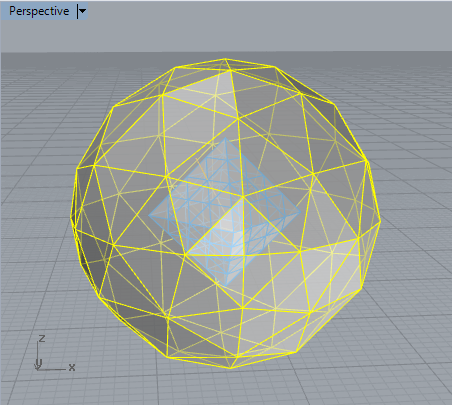
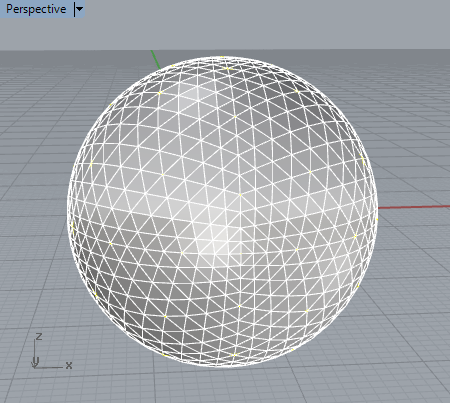
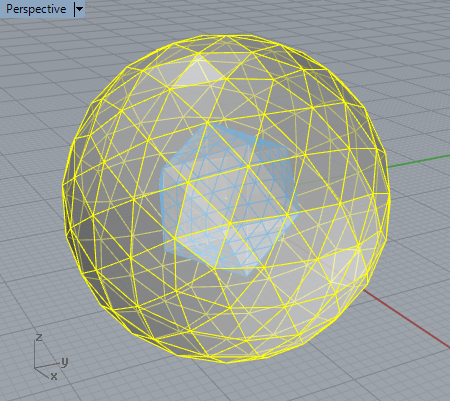
At radius 2, the projection would appear as follows.
 |
 |
| recursive level 3 radius 2 | recursive level 3 radius 2 |
 |
 |
| recursive level 4 radius 2 | recursive level 5 radius 2 |
| #Geodesic
Icosahedron By
Projection From Golden Rectangles #Earl Mark 11.25.17 import Rhino as rh import rhinoscriptsyntax as rs import math def paramPt(ptA, ptB, param): #get parametric point from ptA to ptB x = ptA.X + (ptB.X - ptA.X) * param y = ptA.Y + (ptB.Y - ptA.Y) * param z = ptA.Z + (ptB.Z - ptA.Z) * param pt = rh.Geometry.Point3d(x, y, z) return pt def getCentroid(ptList): #get centroid of a point list x = 0 y = 0 z = 0 for pt in ptList: x += pt.X y += pt.Y z += pt.Z cPt = rh.Geometry.Point3d(x/len(ptList), y/len(ptList) , z/len(ptList)) return cPt def subdivideTrianglePts(trianglePts): #divide one triangle's pts into 4 sets of #triangle pts including center triangle pt1 = trianglePts[0] pt2 = trianglePts[1] pt3 = trianglePts[2] #get mid points of each side pt1m = paramPt(pt1, pt2, 0.5) pt2m = paramPt(pt2, pt3, 0.5) pt3m = paramPt(pt3, pt1, 0.5) #determine four triangles lleftT = [pt1, pt1m, pt3m] lrightT = [pt1m, pt2, pt2m] apexT = [pt3m, pt2m, pt3] cenT = [pt3m, pt1m, pt2m] return [lleftT, lrightT, apexT, cenT] def subTriPtRecursive(trianglePts, recur, triangleList): #divides triangles on geodesic surface recursively if (recur == 1): #if finished with recursion (recur == 1) return final set of points triangleList.append(trianglePts) else: #if not finished with recursion (recur > 1) then continue to subivide newTriangles = subdivideTrianglePts(trianglePts) triangleList = subTriPtRecursive(newTriangles[0], recur - 1, triangleList) #lower left triangle triangleList = subTriPtRecursive(newTriangles[1], recur - 1, triangleList) #lower right triangle triangleList = subTriPtRecursive(newTriangles[2], recur - 1, triangleList) #apex triangle triangleList = subTriPtRecursive(newTriangles[3], recur - 1, triangleList) #center triangle return triangleList def subTriPtRecurOnPrimary(octantsTriPts, recur, triangleList): #initiate recursive subdivide for each octants original triangle of pts for primaryT in octantsTriPts: triangleList = subTriPtRecursive(primaryT, recur, triangleList) return triangleList def drawGRectPts(ctrPt): #draw a golden rectangle's points such that ctrPt to corner radius is 1 #use ratios size rectangle distL1 = (1 + math.sqrt(5.0))/2.0 distR2 = 1 distD1 = 1 distR1 = math.sqrt(pow(distL1, 2) + pow(distD1, 2)) distL2 = distR2/distR1 * distL1 distD2 = distR2/distR1 * distD1 w = 2 * distL2 d = 2 * distD2 #establish corner points pt1 = rh.Geometry.Point3d(ctrPt.X - 0.5 * w, ctrPt.Y - 0.5 * d, ctrPt.Z) pt2 = rh.Geometry.Point3d(ctrPt.X + 0.5 * w, ctrPt.Y - 0.5 * d, ctrPt.Z) pt3 = rh.Geometry.Point3d(ctrPt.X + 0.5 * w, ctrPt.Y + 0.5 * d, ctrPt.Z) pt4 = rh.Geometry.Point3d(ctrPt.X - 0.5 * w, ctrPt.Y + 0.5 * d, ctrPt.Z) pts = [pt1, pt2, pt3, pt4] #For debugging, dislay golden rectangle's surface #faces = [] #faces.append([0, 1, 2, 3]) #gRec = rs.AddMesh(pts, faces) return pts def rotatePts(ptList, ctrPt, axisVec, angle): #rotate corner pts of Golden Rectangle on x-y plane (used to determine other two golden rectangles) newPts = [] for pt in ptList: ptNew = rs.AddPoint(pt.X, pt.Y, pt.Z) ptNew = rs.RotateObject(ptNew, ctrPt, angle ,axis = axisVec, copy = True) ptNew = rs.coerce3dpoint(ptNew) #return point as Rhino point (not Rhinoscriptsyntax point) newPts.append(ptNew) return newPts def drawGoldenRects(ctrPt): #creates points and mesh surfaces of the three golden retangles #get the point of the golden rectangle in the x-y plane pts1 = drawGRectPts(ctrPt) #determine three axis of rotation used xVec = rh.Geometry.Vector3d(1, 0, 0) yVec = rh.Geometry.Vector3d(0, 1, 0) zVec = rh.Geometry.Vector3d(0, 0, 1) angle = 90 ptsT = rotatePts(pts1,ctrPt, xVec, angle) #use rotation to get golden rectangle in y-z plane pts2 = rotatePts(ptsT,ctrPt,zVec, angle) #use rotation to get golden rectangle in x-z plane pts3 = rotatePts(ptsT,ctrPt,yVec, -angle) faces = [] faces.append([0, 1, 2, 3]) mesh1 = rs.AddMesh(pts1,faces) mesh2 = rs.AddMesh(pts2,faces) mesh3 = rs.AddMesh(pts3,faces) return pts1, pts2, pts3, mesh1, mesh2, mesh3 def drawPrimeIcosahedron(pts1, pts2, pts3): #draw bottom and mid level triangles counter clockwise from lower left #then draw upper level triangles in similar order #in addition, each set of three triangular points must be assembled in counter-clockwise order #when view from outside the Octrahedron towards the interior center # #lists of 20 sets of triangular pts flattened on primary icosahedron tList = [] tList.append([pts3[3],pts2[0],pts1[0]]) tList.append([pts2[0],pts2[3],pts1[0]]) tList.append([pts3[3],pts3[0],pts2[0]]) tList.append([pts2[0],pts1[1],pts2[3]]) tList.append([pts3[0],pts1[1],pts2[0]]) tList.append([pts3[0],pts1[2],pts1[1]]) tList.append([pts3[0],pts2[1],pts1[2]]) # 8 5 2 tList.append([pts2[1],pts2[2],pts1[2]]) tList.append([pts3[0],pts3[3],pts2[1]]) tList.append([pts2[1],pts1[3],pts2[2]]) tList.append([pts3[3],pts1[3],pts2[1]]) tList.append([pts1[3],pts1[0],pts3[2]]) tList.append([pts1[0],pts2[3],pts3[2]]) tList.append([pts2[3],pts3[1],pts3[2]]) tList.append([pts1[1],pts1[2],pts3[1]]) tList.append([pts1[2],pts2[2],pts3[1]]) tList.append([pts2[2],pts3[2],pts3[1]]) tList.append([pts1[3],pts3[2],pts2[2]]) tList.append([pts1[1],pts3[1],pts2[3]]) tList.append([pts3[3],pts1[0],pts1[3]]) #faceList indices (indices of 20 triangular facets) on primary icosahedron faceList = [] faceList.append([11,4,0]) faceList.append([11, 0, 3]) faceList.append([4, 7, 0]) faceList.append([11, 8, 4]) faceList.append([4, 1, 7]) faceList.append([8, 1, 4]) faceList.append([8, 2, 1]) faceList.append([8, 5, 2]) faceList.append([5, 6, 2]) faceList.append([8, 11, 5]) faceList.append([5, 3, 6]) faceList.append([11, 3, 5]) faceList.append([3, 0, 10]) faceList.append([0, 7, 10]) faceList.append([7, 9, 10]) faceList.append([1, 9, 7]) faceList.append([1, 2, 9]) faceList.append([2, 6, 9]) faceList.append([6, 10, 9]) faceList.append([3, 10, 6]) #point list forming base rectangles of icosahedron and index numerical order in comment lines above #index 0 1 2 3 4 5 6 7 8 9 10 11 ptList = [pts1[0], pts1[1], pts1[2], pts1[3], pts2[0], pts2[1], pts2[2], pts2[3], pts3[0], pts3[1], pts3[2], pts3[3]] #create icosahedron poly mesh mesh1 = rs.AddMesh(ptList, faceList) return tList, mesh1 #return initial triangle point list, initial mesh. def projectPts(allTrianglePts, centerPt, r): #project all triangular faces to a spherical vertices based upon the radius r projTPts = [] cX = centerPt.X cY = centerPt.Y cZ = centerPt.Z #for each corner pt of each triangle for t in allTrianglePts: pt1 = t[0] pt2 = t[1] pt3 = t[2] #determine a vector from the centerPt to each point v1 = rh.Geometry.Vector3d(pt1.X - cX, pt1.Y - cY, pt1.Z - cZ) v2 = rh.Geometry.Vector3d(pt2.X - cX, pt2.Y - cY, pt2.Z - cZ) v3 = rh.Geometry.Vector3d(pt3.X - cX, pt3.Y - cY, pt3.Z - cZ) #unitize each vector (so that it has length 1) v1.Unitize() v2.Unitize() v3.Unitize() #multiple vector x, y, z component by the radius and add to the centerPt tP1 = rh.Geometry.Point3d(v1.X * r + cX,v1.Y * r + cY, v1.Z * r + cZ) tP2 = rh.Geometry.Point3d(v2.X * r + cX,v2.Y * r + cY, v2.Z * r + cZ) tP3 = rh.Geometry.Point3d(v3.X * r + cX,v3.Y * r + cY, v3.Z * r + cZ) projTPts.append([tP1, tP2, tP3]) return projTPts def buildPolysurf(projTPts, centerPt): #build faces, center points and center point surface normals i = 0 s = 0 indexList = [] ptList = [] vertexNormals = [] vecNCs = [] cPts = [] surfs = [] for t in projTPts: curSurfIndex = [i, i + 1, i + 2] indexList.append(curSurfIndex) ptList.append(t[0]) ptList.append(t[1]) ptList.append(t[2]) cPt = getCentroid([t[0],t[1],t[2]]) cPts.append(cPt) vecN = rh.Geometry.Vector3d(cPt.X - centerPt.X,cPt.Y - centerPt.Y,cPt.Z - centerPt.Z) vecN.Unitize() vecN = rh.Geometry.Vector3d(round(vecN.X, 2), round(vecN.Y, 2), round(vecN.Z, 2)) cPts.append(cPt) #Duplicate surface normal for each tiangle vertex of a given face vertexNormals.append(vecN) vertexNormals.append(vecN) vertexNormals.append(vecN) #Save surface normal for each centroid of a given face vecNCs.append(vecN) i += 3 #build the polygon mesh surface with surface normals pointing out and away from centerPt #surface normals by convention determine positive and visible side of surface surf1 = rs.AddMesh(ptList,indexList,vertexNormals) return [surf1, cPts, vecNCs] def displayPrimaryTrianglePts(allTrianglePts): flatPolyLineList = [] for tri in allTrianglePts: pline = rs.AddPolyline([tri[0], tri[1], tri[2], tri[0]]) flatPolyLineList.append(pline) return flatPolyLineList #main #create Golden Retangles grLists = drawGoldenRects(ctrPt) pts1 = grLists[0] pts2 = grLists[1] pts3 = grLists[2] mesh1 = grLists[3] mesh2 = grLists[4] mesh3 = grLists[5] #draw primary icosahedron at radius 1 iCos = drawPrimeIcosahedron(pts1, pts2, pts3) tList = iCos[0] mesh = iCos[1] #subdivide each face of icosahedron into triangles recursively allTrianglePts = [] allTrianglePts = subTriPtRecurOnPrimary(tList, recur, allTrianglePts) #get flattened list triangles on each face if desired for display flatPolyLineList = displayPrimaryTrianglePts(allTrianglePts) #project all triangles on each face away from center according to value of the radius projAllTPoints = projectPts(allTrianglePts, ctrPt, radius) #build surface of icosahedron as well as face centerpoints and face normals surfData = buildPolysurf(projAllTPoints, ctrPt) #display of primary geometry and output of facet centerpoint normals if(displayGeodesic): m = surfData[0] #mesh surface (combined icosahedron faces) c = surfData[1] #mesh face centerPts (icosahedron face centerPts) n = surfData[2] #mesh face normals (icosahedron face normal vectors) #display of secondary interim construction element geometry (if desired) if (displayCE): i = mesh # primary icosahedron at radius 1 g = mesh1, mesh2, mesh3 #golden rectangles t = flatPolyLineList #flat triangles on each face of primary icosahedron #print the number of faces = number of face normals print("Number faces " + str(len(n))) |
Summary
Within this workshop we have developed a few basic scripts for representing three-dimensional surfaces . The principal building block of these surface elements has been a three sided triangular polygon. We examined how such three sided polygons could be spherically projected so as to create various kinds of geodesic surfaces. The examples also demonstrate the power of vector methods of projection where we follow a three step process:
1. Find the vector from the center of the surfacefor each vertices on a triangulated surface.
2.
Change each such vector into one of unit length 1.0 (a so-called
"unit" vector) but having the same direction as the original
vector.
3. Scale each vector by the radius value to get the triangulated points of the surface desired.
This is a not untypical approach to working through the use of vectors in geometrical modeling.