3D Animation: Actors and Hierarchies of Motion
 Just like in the production of a movie, an actor in animation is someone (or
something) that plays a role in the movie sequence. In animation, actors
are simply objects or groups of objects that have a single identifiable
name. A single box could be an actor named "Box" or the entire
composition of a door, including the wood slab, a window, door knobs,
etc., can be grouped together and simply called door.
From that point
forth in the animation, those objects will operate collectively as
"Door". Assemblies of this sort can be very simple, as in the case of
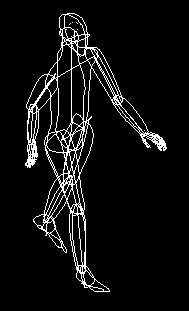
the door, or can be very complex, such as a human figure with
independant arms, legs, hands, fingers, and toes. We'll work with an
actor named Ergoman a bit later.
Just like in the production of a movie, an actor in animation is someone (or
something) that plays a role in the movie sequence. In animation, actors
are simply objects or groups of objects that have a single identifiable
name. A single box could be an actor named "Box" or the entire
composition of a door, including the wood slab, a window, door knobs,
etc., can be grouped together and simply called door.
From that point
forth in the animation, those objects will operate collectively as
"Door". Assemblies of this sort can be very simple, as in the case of
the door, or can be very complex, such as a human figure with
independant arms, legs, hands, fingers, and toes. We'll work with an
actor named Ergoman a bit later.
 Animation actors can also have specific types of mobility. Any object
in MicroStation can be keyframed in any condition without contraint.
These objects can be moved, stretched, and scaled around without
anything preventing you from doing this. There are many cases, however,
when we need, or desire, to constrain the mobility of a given actor to a
specific set of motions. Without constraints, an actor has a full nine
degrees of freedom: 3 axes of linear motion, 3 axes of revolution, and 3
axes of scaling. (Non-Actors add a 10th "degree" of freedom, as they
can be warped and distorted, sometimes called morphing, into a different
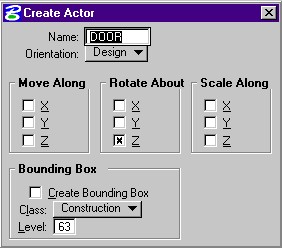
shape). Objects like a door, for instance, do not need all nine of these
freedoms. A door, in fact, only needs one: rotation about its vertical
axis. Because of this, we have the ability in MicroStation to establish
constraint properties for a given actor, and only allow for its motion
along the freedoms that we choose. This keeps our understanding of an
object's motion simpler, and the process by which we manipulate it
cleaner and less prone to mistakes.
Animation actors can also have specific types of mobility. Any object
in MicroStation can be keyframed in any condition without contraint.
These objects can be moved, stretched, and scaled around without
anything preventing you from doing this. There are many cases, however,
when we need, or desire, to constrain the mobility of a given actor to a
specific set of motions. Without constraints, an actor has a full nine
degrees of freedom: 3 axes of linear motion, 3 axes of revolution, and 3
axes of scaling. (Non-Actors add a 10th "degree" of freedom, as they
can be warped and distorted, sometimes called morphing, into a different
shape). Objects like a door, for instance, do not need all nine of these
freedoms. A door, in fact, only needs one: rotation about its vertical
axis. Because of this, we have the ability in MicroStation to establish
constraint properties for a given actor, and only allow for its motion
along the freedoms that we choose. This keeps our understanding of an
object's motion simpler, and the process by which we manipulate it
cleaner and less prone to mistakes.
Use MicroStation Link to work with this door as an example.
A door may not be the best example of when we would choose to constrain
an actor, as a door is a simple enough object to work with. a human
figure, on the other hand, is not. Arms and legs twist only one way, and I doubt
that you would want anyone pulling your head off of the top of your
body, sliding it along the vertical axis... Actors give us the ability
to identify these parts, then to establish their individual rules of
motion.
Hierarchies of Motion
Taking the example of a human figure a bit farther, we need in
animation, the capability to link these unique actor parts together into
some meaningful, and practical, organization. Typically, an arm would
be a separate actor from a torso, as the two have very different
constraints on their motion, but if we move the torso along an axis, we
would more than likely want the arms to follow along. Linkages of this
sort are accomplished through actor hierarchies.
To create a hierarchy of motion in MicroStation, we must simply 'Attach'
one actor to another. Their separate motions will then be linked, and
motion of the upper parts of the hierarchy (the torso) will effect
motion of any lower parts (the arm, then hand, then fingers). Once
actors are attached, we can manipulate them individually at will, but
all motions will carry throughout the assembly. We can then keyframe a
condition of the complete hiererchical assembly (you cannot keyframe
individual parts separately), and create a sequence of motion.
MicroStation Link file ERGOMAN2.DGN